Overview of Collected Data
We have designed various types of accident scenarios that frequently happen in real-world driving scenarios according to NHTSA's pre-crash report. For each scenario, we have set four vehicles and one infrastructure to record a full set of sensor data, including both multi-view RGB cameras and LiDAR, thus enabling V2X autonomous driving research. The four vehicles include the two designed colliding vehicles and another two vehicles following behind them to provide diverse viewpoints. As for the infrastructure side's sensors, we make the sensors face toward the intersection and mount at a random height from 3 to 5 meters, as shown here.
Data were collected from a wide range of different scenes, including urban streets, highways, and rural areas across seven towns in CARLA.
Designed Scenarios
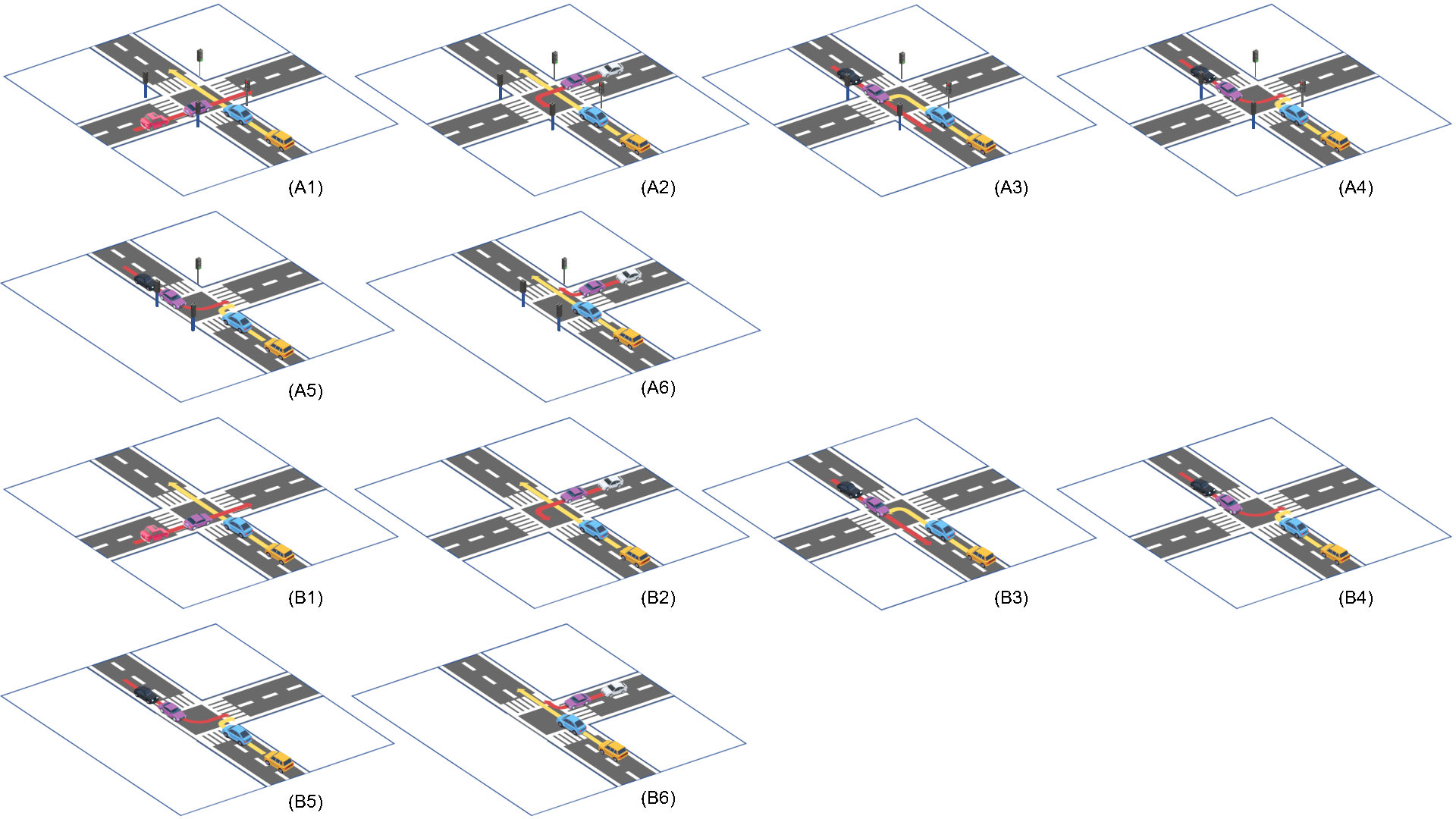
- Designed accident scenarios:
- A - scenarios at signalized intersections:
(1) running against a red light at four-way intersections, (2) left turn against a red light at four-way intersections, (3) unprotected left turn at four-way intersections, (4) right turn against left turn at four-way intersections, (5) right turn against left turn at three-way intersections, (6) go straight against right turn at three-way intersections, - B: Similar to A, but at unsignalized intersections
- A - scenarios at signalized intersections:
RGB Cameras
- On vehicle
- 70° horizontal FoV (Front/FrontLeft/FrontRight/BackLeft/BackRight Camera)
- 110° horizontal FoV (Back Camera)
- image size: 1600x900 pixels






- On infrastructure
- 70° horizontal FoV (Front/FrontLeft/FrontRight/BackLeft/BackRight Camera)
- 110° horizontal FoV (Back Camera))
- image size: 1600x900 pixels






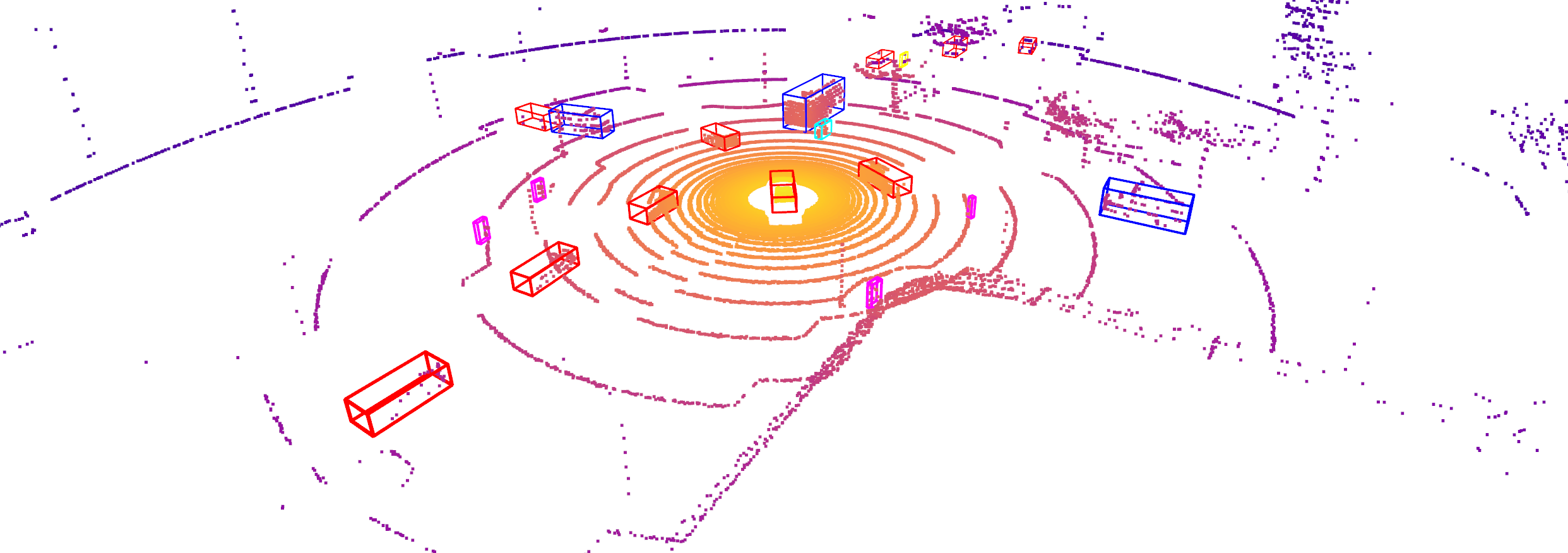
LiDAR Sensor
- On vehicle
- mounted at the top of vehicle
- 32 channels
- 70m max range
- 400,000 points per second
- 10 Hz rotation frequency
- 30° vertical FoV
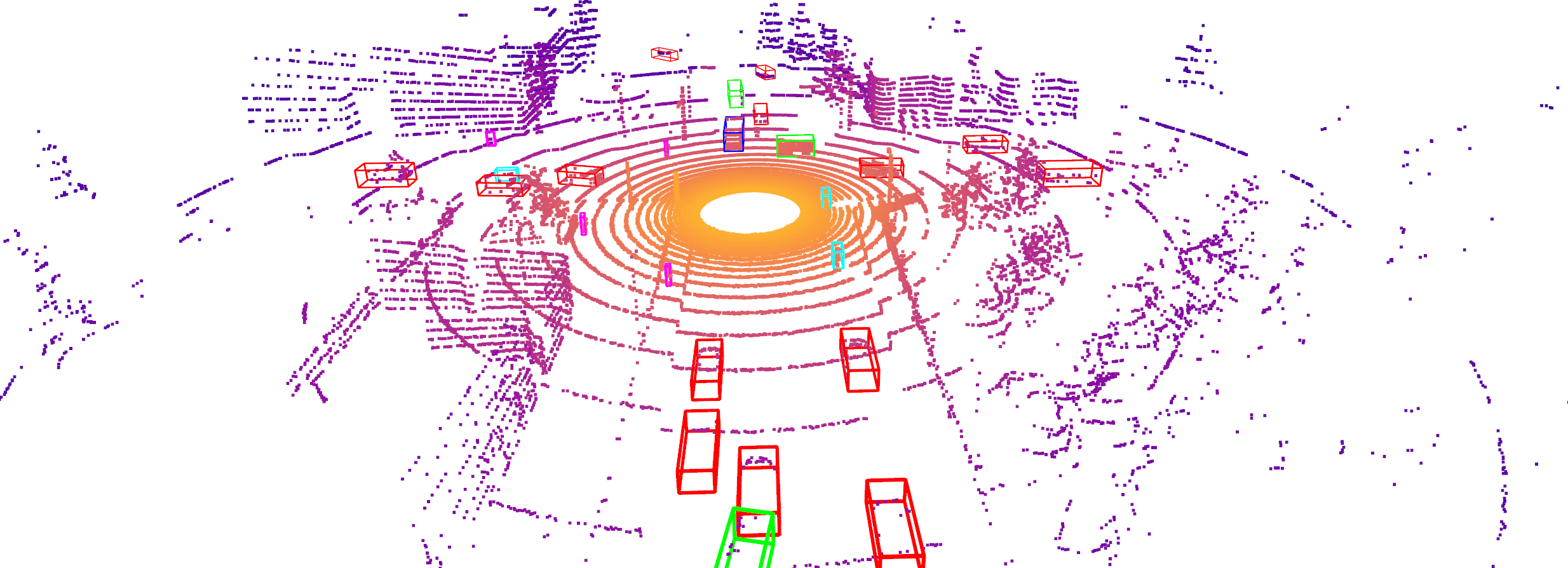
- On infrastructure
- mounted at the height of 3 to 5 meters
- 32 channels
- 70m max range
- 400,000 points per second
- 10 Hz rotation frequency
- 30° vertical FoV
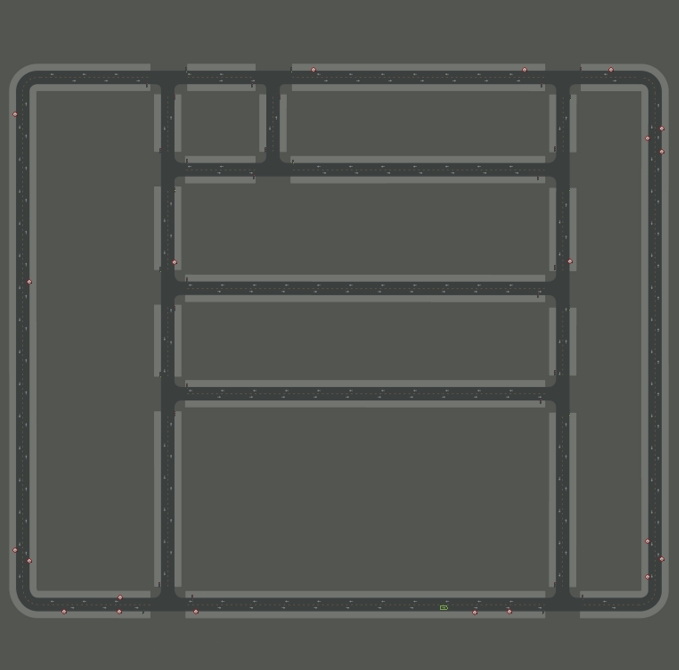
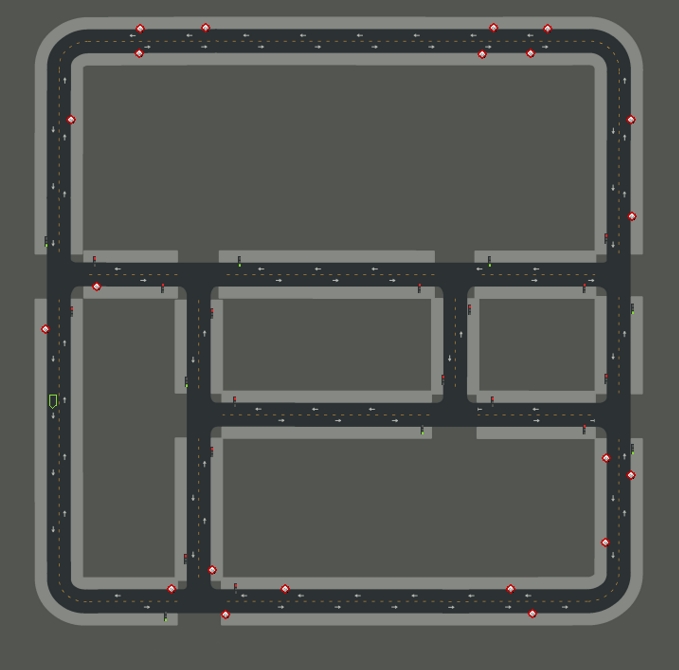
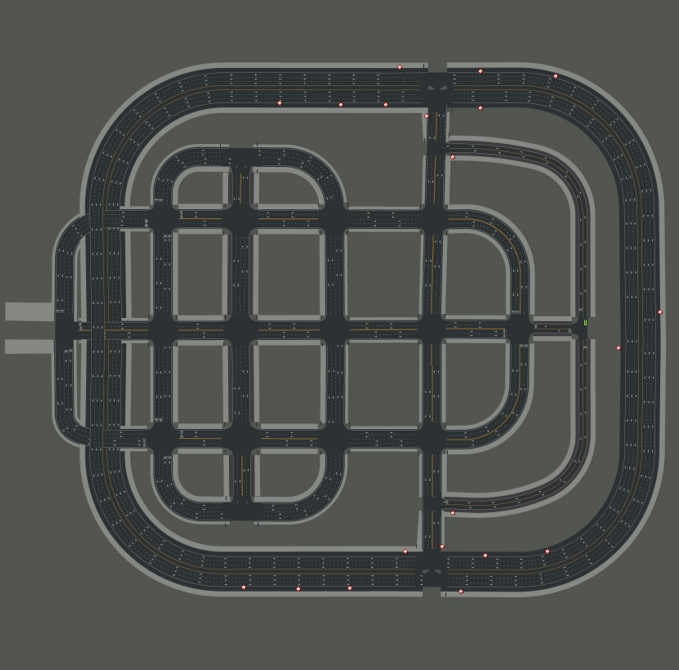
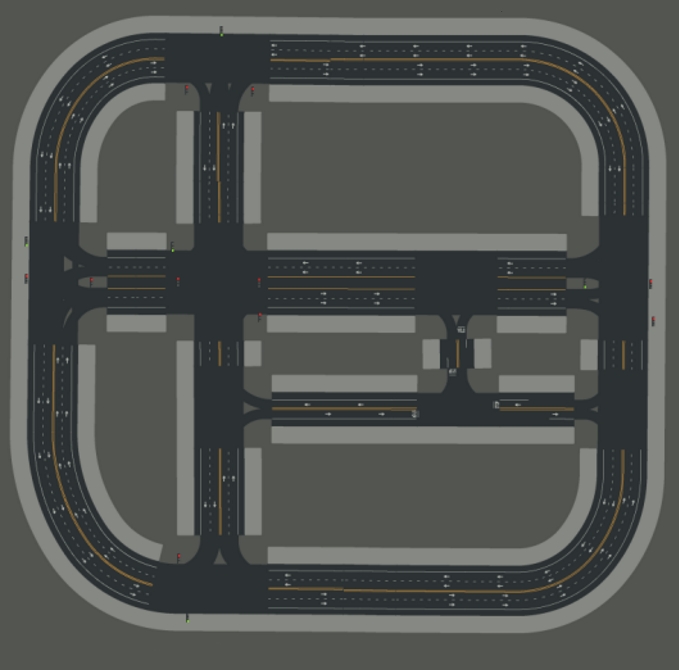
Town Maps
The current version of DeepAccident data is collected across seven CARLA towns - Town01, Town02, Town03, Town04, Town05, Town07, and Town10.
Town01 and Town02 are small towns with narrow roads. Town03 is the most complex town in CARLA up to the time of collecting DeepAccident (0.9.13) with unique road layouts like uphill roads and roundabouts. Town04 is a town connected with highway entrances and exists. Town05 is the largest map in terms of the map area and has multiple driving lanes per direction. Town07 covers rural regions such as some corn fields and contains curvy mountain roads. Town10 is the most visually realistic town in CARLA and is a modern downtown area.
More details about the towns in CARLA can be found at CARLA's documentations.










Citation
If you find the dataset helpful, please consider citing us.
@article{Wang_2023_DeepAccident,
title = {DeepAccident: A Motion and Accident Prediction Benchmark for V2X Autonomous Driving},
author = {Wang, Tianqi and Kim, Sukmin and Ji, Wenxuan and Xie, Enze and Ge, Chongjian and Chen, Junsong and Li, Zhenguo and Ping, Luo},
journal = {arXiv preprint arXiv:2304.01168},
year = {2023}
}